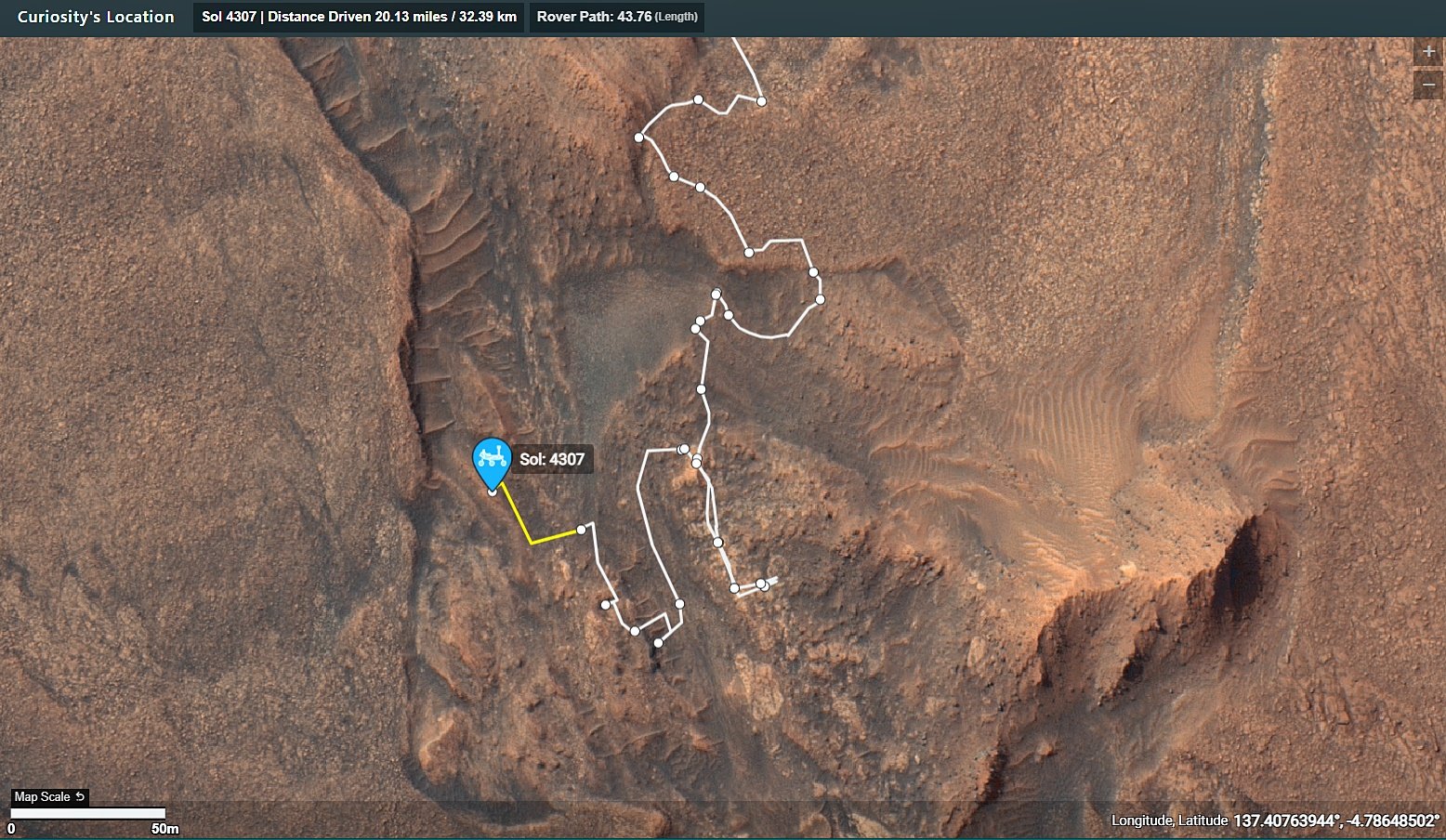
The public can access the mission map on this URL. It is updated by the mission team after each drive https://mars.nasa.gov/maps/location/?mission=Curiosity
Check out the online map using this link https://mars.nasa.gov/maps/location/?mission=Curiosity
Leaning Back, Driving Back - Curiosity Rover Blog for Sols 4309–4310
Earth planning date: Wednesday, September 18, 2024
The lengthy drive planned on Monday executed as expected, and we came in today to find our rover parked at a jaunty angle on a sloped ridge. There were some worries that the slope might limit our ability to use the arm for contact science in this plan (we don't want to do anything that might cause the rover to slide down the slope!), but after some careful consideration, we received the good news that all six of our wheels are holding on firmly to the ground, so there was no risk of slipping.
On Monday, two different options for today's plan were laid out. The first option, a "full contact science" plan where we don't drive, was to be executed if Monday's drive put us exactly where we hoped. The second, a "touch-and-go" plan where we do some light contact science before driving away, was to be executed if the drive didn't put us where we wanted to be. As it happened, the rover was a little too enthusiastic about driving, and actually put our desired workspace under its body rather than in front where the arm could reach it. There's always a little uncertainty in the final position after such a long drive! So, we decided to stick with a touch-and-go plan that includes a tiny backwards drive of less than a metre to reposition our desired target in front of the rover.
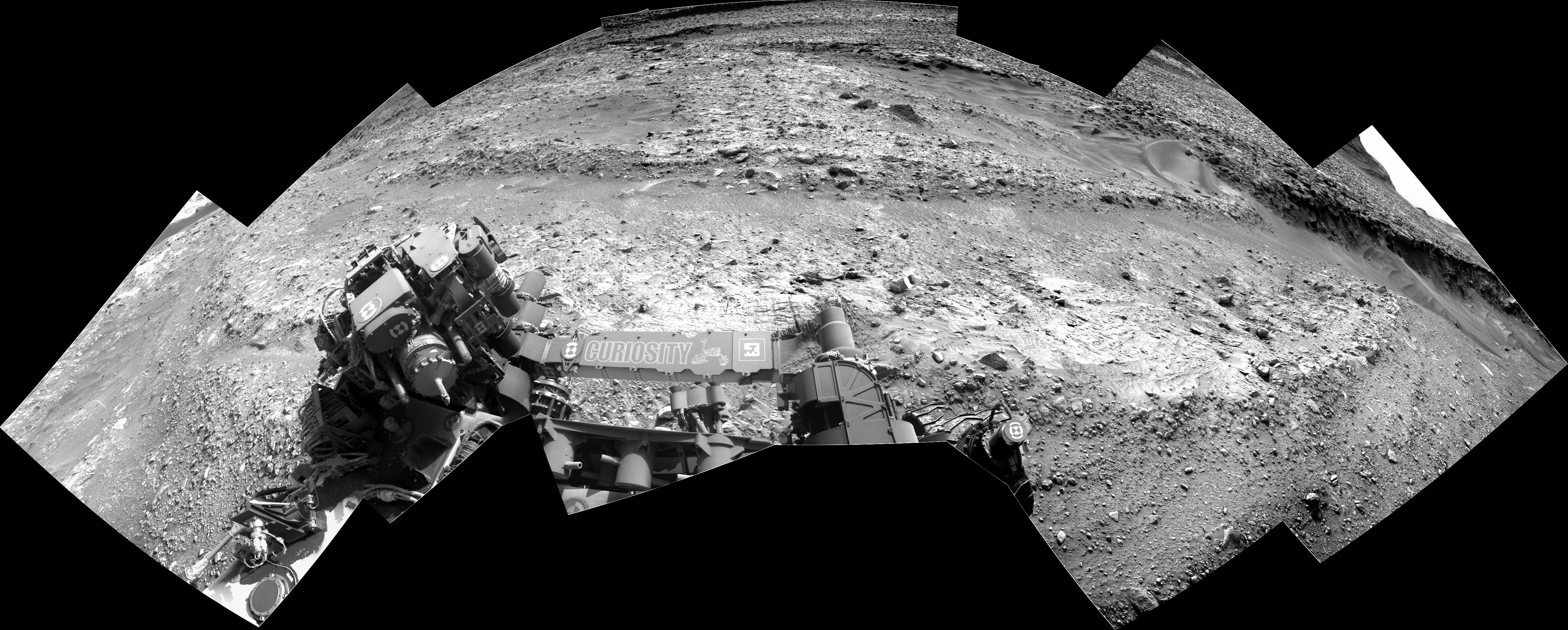
Although we need to re-position, we aren't slowing down on science for even a second. We are parked in front of a large fractured slab of bedrock, which can be seen in the above image. This slab became the contact science target for this plan with DRT and APXS activities on "The Minster." Mastcam is getting a workout today as well, with large mosaics of "North Channel," "Buckeye Ridge," "Quinn," and "Island Pass." These mosaics are all documenting various aspects of the ridge we're sat on and the edge of the Gediz Vallis Channel, including sedimentary rocks, white sulphate materials, and gravels and fine-grained materials. ChemCam is also taking a turn on the bedrock slab with a LIBS activity on "Grand Sentinel" and a mosaic of some exposed white stones off in the distance.
The second sol of the plan, after our short drive, is largely taken over by environmental science activities, though there is our usual post-drive ChemCam AEGIS. These activities include a Mastcam tau and Navcam line-of-sight to measure the amount of dust in the atmosphere around and above us, as well as a dust devil movie, suprahorizon cloud movie, and some Navcam deck monitoring to see if our driving or the wind is moving around any of the sand and dust on the rover deck. The team is also taking the usual set of REMS, RAD, and DAN observations.
Written by Conor Hayes, Graduate Student at York University
Source for this blog and the archive of all blogs (with all the links and the original raw images etc): https://science.nasa.gov/blog/sols-4309-4310-leaning-back-driving-back/
These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public.
Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
Image credits: NASA/JPL-Caltech

De-Bayered L-MastCam mosaic - Assembled in MS-ICE
NASA/JPL-Caltech/MSSS/fredk

Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover's robotic arm, during September 17, 2024 (Sol 4307). The camera focus motor count (returned with the image) can be used to calculate the camera standoff distance (camera lens to the target). In this case the standoff was close to 25 centimeters (~10 inches). This provides an image scale of ~95 micrometers per image pixel, or a scene width of ~15 centimeters (~6 inches). Image Credits: NASA/JPL-Caltech/MSSS.

Awaiting drive data and the location. While we're waiting for those details, I have assembled a selection of the post drive L-NavCam images into a small mosaic, clearly showing the low ridge in front of the rover that was discussed in the last mission update.
The public can access the mission map on this URL. It is updated by the mission team after each drive https://mars.nasa.gov/maps/location/?mission=Curiosity
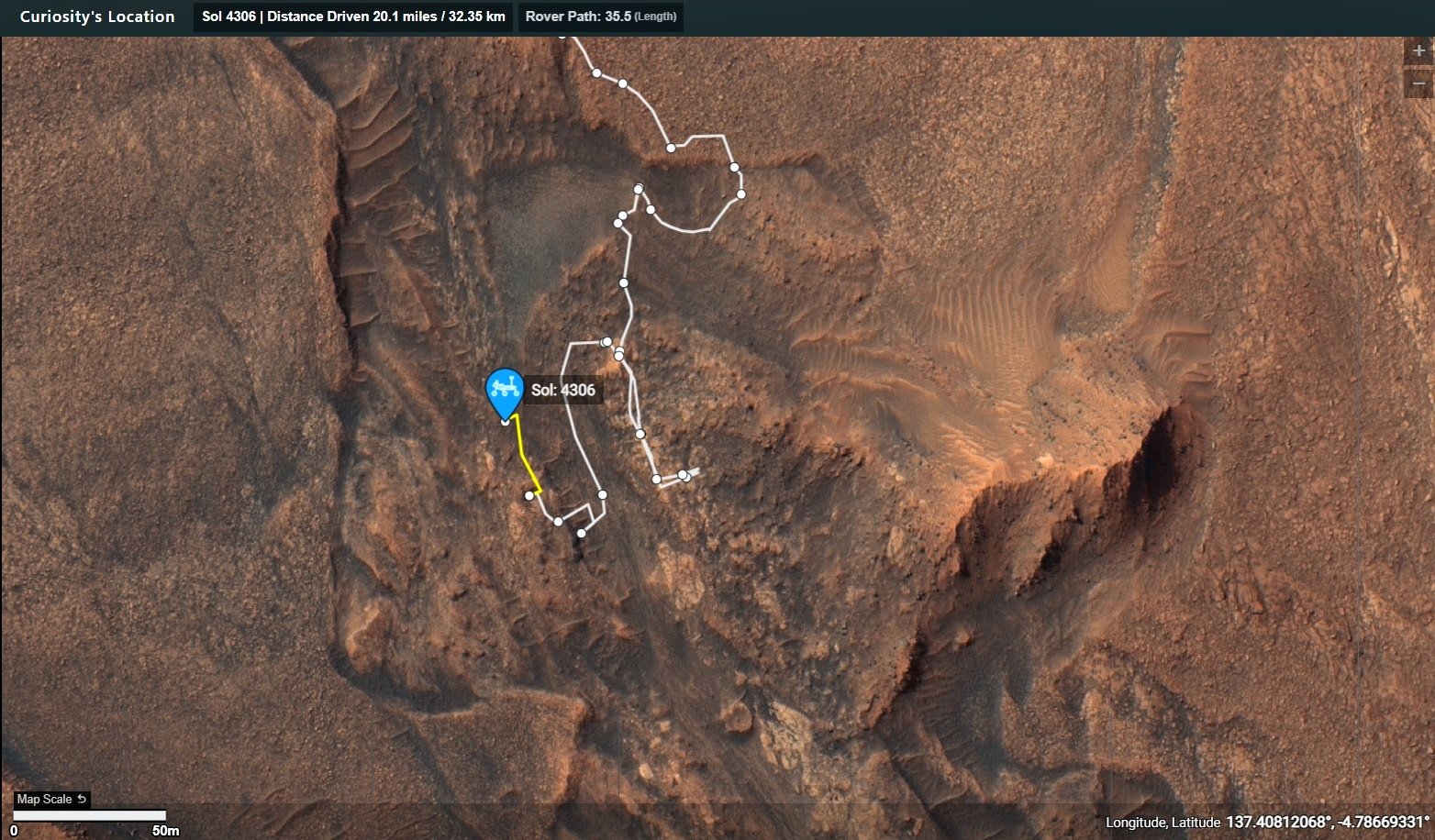
The reasons for the drive on sol 4306 are detailed in this mission update https://science.nasa.gov/blog/sols-4304-4006-12-years-42-drill-holes-and-now-1-million-chemcam-shots/
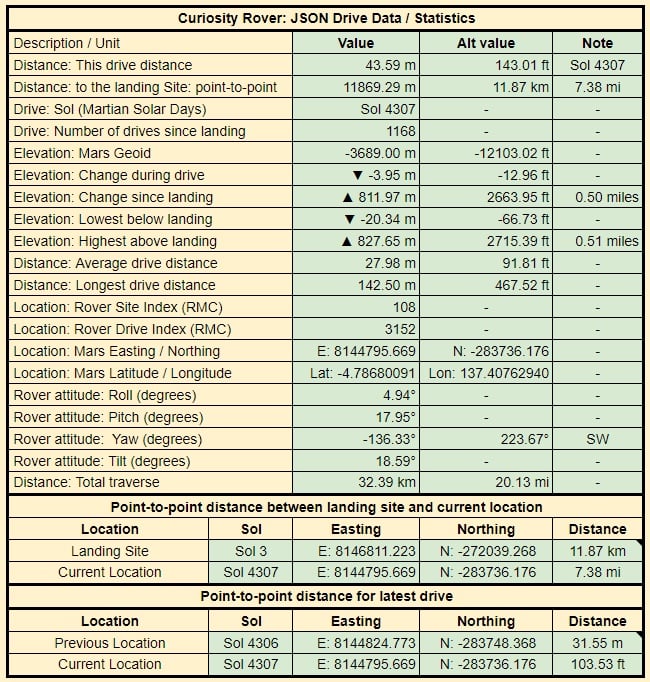
This data is updated and released by JPL via it's JSON URL's after each drive.
I import the JSON data into this table to make it easier to digest
If anyone wants to check the JSON, you can find it on this URL. https://mars.nasa.gov/mmgis-maps/MSL/Layers/json/MSL_waypoints.json
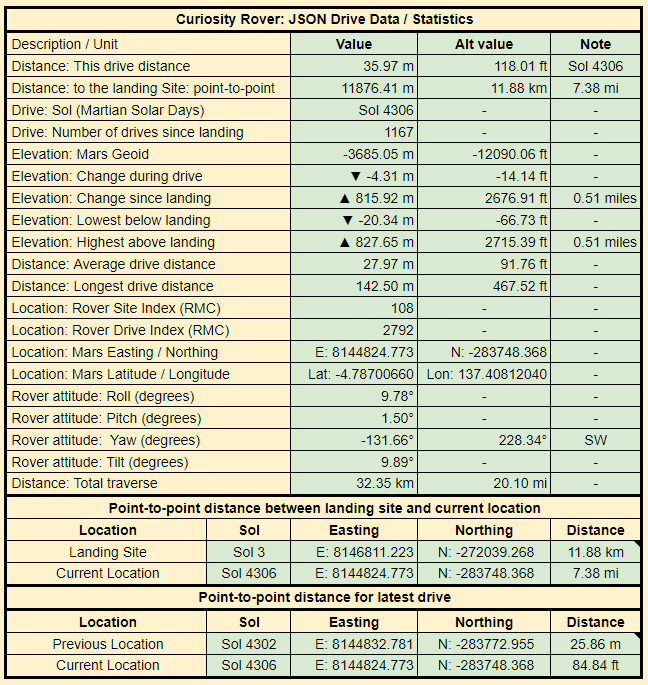
This drive was downslope to site 108.2792. The new site is 4.31 meters (14.14 ft) lower than the previous site 108.2528. The rover is pointing towards the Southwest (228.34°) The end-of-drive image is from the rover left-side navigation camera. Credits: NASA/JPL-Caltech

Perseverance Mars rover is on its ascent to the rim of Jezero Crater, and it captured a portion of the journey with one of its navigation cameras. Forty-five frames were stitched together to create this video showing the rover's progress on Aug. 22, 25, and 26, 2024, the 1,247th, 1,250th, and 1251st Martian days, or sols, of the mission. During the time period captured, Perseverance covered a distance of about 530 feet (160 meters) and gained about 115 feet (35 meters) in elevation.
Credit: NASA/JPL-Caltech/PIA26376

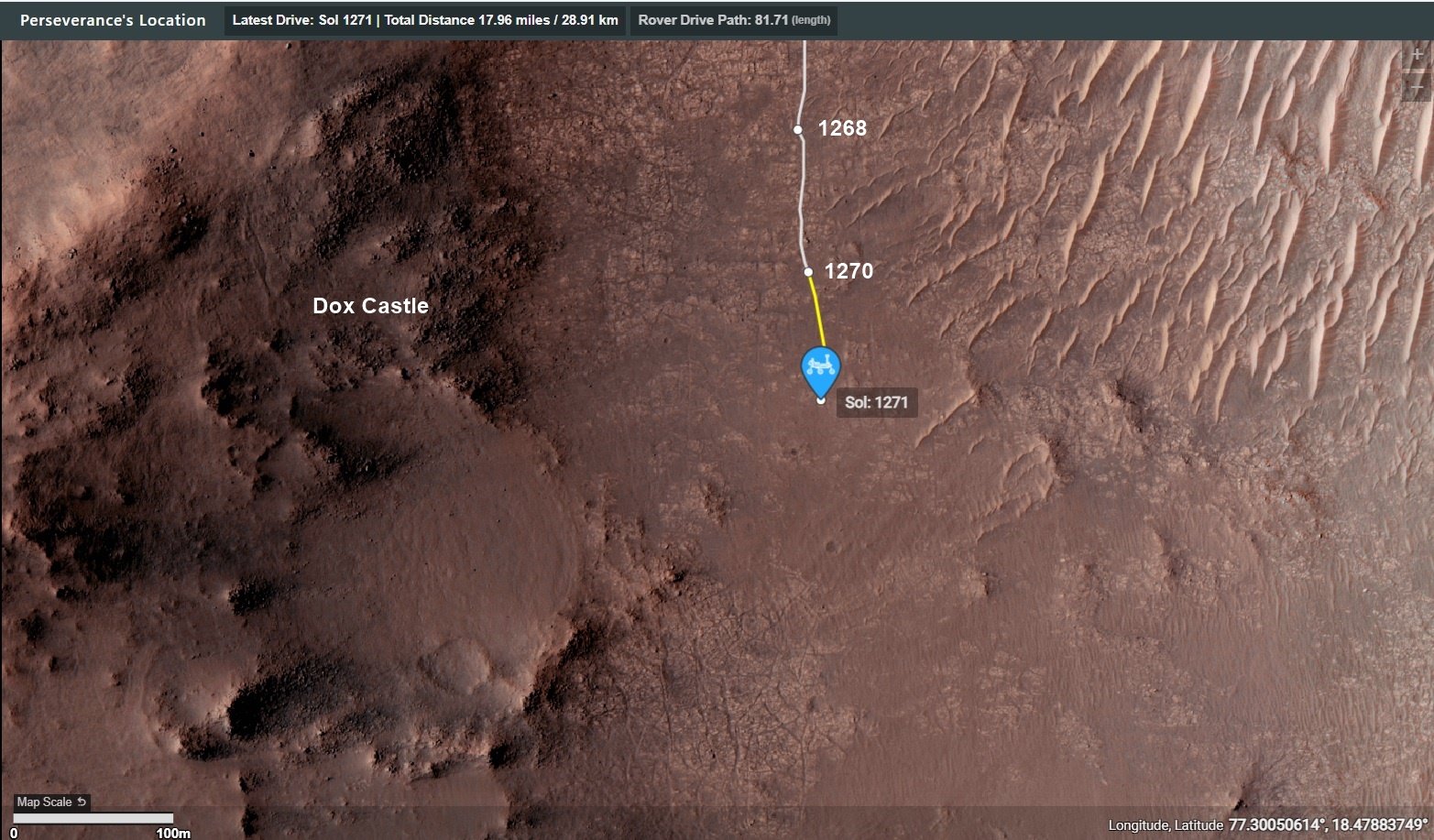
Dox Castle will be our first chance to do rim science, to search for evidence of the transition between the margin and rim materials, and to start piecing together the stratigraphic history of the rocks that make up the rim of Jezero crater.
BattleBots on Mars :)
I would hope they do a mix of "old world" and 'new' world names 😁
The dump is a text file i've updated as the mission progressed. Saves me time when I get asked the question re place names.
It's a naming convention.
Curiosity is currently in the "Bishop" map quadrangle. “Tungsten Hills” rocks, were named after a famous mining district near Bishop, California.
It was mentioned in this mission update https://science.nasa.gov/blog/sols-4300-4301-rippled-pages/
Before touching down in Gale crater Curiosity's landing ellipse and the foothills of Aeolis Mons (Mt. Sharp) were divided up into 151 map quadrangles to aid geological mapping. Each of these square areas of interest spans 0.025 degrees in latitude by 0.025 degrees in longitude, each quadrangle measures about 1.5 kilometers square or about 1.22 x 1.22 km. Each quadrangle is assigned a name of a town with a population less than 100,000 people.
Map quadrangles are usually named after towns close to notable regions of geological interest on Earth, its name then provides the source of the target names within each quadrangle.
List of Quadrangles the rover has visited:-
Yellowknife: Quadrangle #51: Yellowknife a city in northwestern Canada as well as group of rocks from the same region. The rocks were formed 2.7 billion years ago from both volcanoes and sediments laid down by water, and were deposited over 4-billion-year-old rocks, the oldest known on Earth.
Mawson: Quadrangle #65: Mawson, Antarctica, permanent base and research outpost in Antarctica, named after the Antarctic geologist and explorer Sir Douglas Mawson.
Coeymans: Quadrangle #64. Takes its name from the town of Coeymans in upstate New York, located near the fossil‐rich Coeymans Limestone Formation.
Kimberley: Quadrangle #78. Takes its name from the northernmost region of Western Australia, the site of many important geologic investigations of Precambrian rocks.
Hanover: Quadrangle #77, Takes its names from a New Hampshire city.
Shoshone: Quadrangle #91. Takes its name from Shoshone Village in Inyo County, California located just outside Death Valley National Park and the Nopah Range Wilderness Area.
Arlee: Quadrangle #90. Takes is name from after a geological district in Montana
Windhoek: Quadrangle #104. Takes its name from a geological district in Namibia.
Bar Harbor: Quadrangle #118 Takes its name from Bar Harbor, Maine
Kuruman: Quadrangle #132. This quadrangle is named after a charming town situated on the edge of the Kalahari desert in South Africa. Notably, the town of Kuruman is the namesake for the Kuruman Iron Formation, a ~2.46 billion year sedimentary rock that is rich in hematite. Hematite is the same mineral we can see is distributed throughout the Vera Rubin Ridge from orbital data! The target names in this quadrangle are pulled from famous geological features from South Africa and nearby Botswana and Zimbabwe.
Biwabik: Quadrangle #119, the Biwabik name was selected because of the city's connection with the Mesabi Range, which contains large deposits of Precambrian iron ore.
Torridon: Quadrangle #133, Named after a village in the Northwest Highlands of Scotland, which is near an important geological formation called the Torridonian Supergroup. Therefore, all of the names assigned to targets in this region of Curiosity's traverse come from landforms, geologic formations, and towns in that part of Scotland.
Nontron: Quadrangle #134, 'Nontron' is named after a commune in the Dordogne in southwestern France. The Nontron quadrant name is particularly appropriate for the clay-bearing terrain we find ourselves in as Nontron is the type locality for a clay mineral called nontronite. Nontronite is part of the smectite group of clays, which are the most common types of clays on Mars.
Roraima: Quadrangle #147. The Roraima quadrant is named after the northern-most state of Brazil and Mount Roraima, which is the highest peak in the Pakaraima mountains which sits between Brazil, Venezuela, and Guyana. The terrain in the Roraima region on Earth looks somewhat similar to the area Curiosity is in - with flat-topped hills and some steep slopes.
Kalavryta: Quadrangle #148 Kalavryta is named after a town in Greece, due west of Athens and near the Chelmos-Vouraikos UNESCO Global Geopark, a region that consists of 40 unique geological sites including caves, karstic springs, rivers, alpine lakes, and fossil sites.
Bishop: (Current Quadrangle) Bishop California is located in Owens Valley, and is the starting point for trips into the High Sierra, including some awesome geology. It feels like a fitting name for this part of Curiosity’s ascent of Mt. Sharp!-
MG seems to like click bait titles for his YT videos. I try to ignore the titles so I can enjoy the content :)
No laser comms at Mars yet, so still relying on the DSN. From what I have read the laser comms trials have been very successful, so I guess we'll have to limp by on DSN radio until the funds to improve the service are available. In today's economic climate, I'm assuming that could be a rather long wait...
Hopefully we'll see more funding on Earth to research on similar coatings that occur here on Earth
I'd rather have this one for my desk : https://science.nasa.gov/resource/curiosity-rover-finds-and-examines-a-meteorite-on-mars-2/
And all the low-lying terrain in this image was under water…
See post (just posted) for the estimated extent of the Paleo Lake : https://lemmy.world/post/19643561
The Martian hand is considered tame compared with the NSFW traverse inside Neretva Vallis by Perseverance rover 😂